
Framework for online simulation of soft ...

Communication dans un congrès avec actes
Framework for online simulation of soft robots with optimization-based inverse model
Duriez, Christian [Auteur] 
Coevoet, Eulalie [Auteur]
Largilliere, Frédérick [Auteur]
Bieze, Thor [Auteur]
Zhang, Zhongkai [Auteur]
Sanz Lopez, Mario [Auteur]
Carrez, Bruno [Auteur]
Marchal, Damien [Auteur]
Goury, Olivier [Auteur]
Dequidt, Jeremie [Auteur]
Coevoet, Eulalie [Auteur]
Largilliere, Frédérick [Auteur]
Bieze, Thor [Auteur]
Zhang, Zhongkai [Auteur]
Sanz Lopez, Mario [Auteur]
Carrez, Bruno [Auteur]
Marchal, Damien [Auteur]
Goury, Olivier [Auteur]
Dequidt, Jeremie [Auteur]
SIMPAR: IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots
San Francisco
Etats-Unis d'Amérique
2016-12-12
Proceedings of SIMPAR 2016 conference
2016-12-15
Informatique [cs]/Synthèse d'image et réalité virtuelle [cs.GR]
Informatique [cs]/Robotique [cs.RO]
Sciences de l'ingénieur [physics]/Automatique / Robotique
Informatique [cs]/Robotique [cs.RO]
Sciences de l'ingénieur [physics]/Automatique / Robotique
[en]
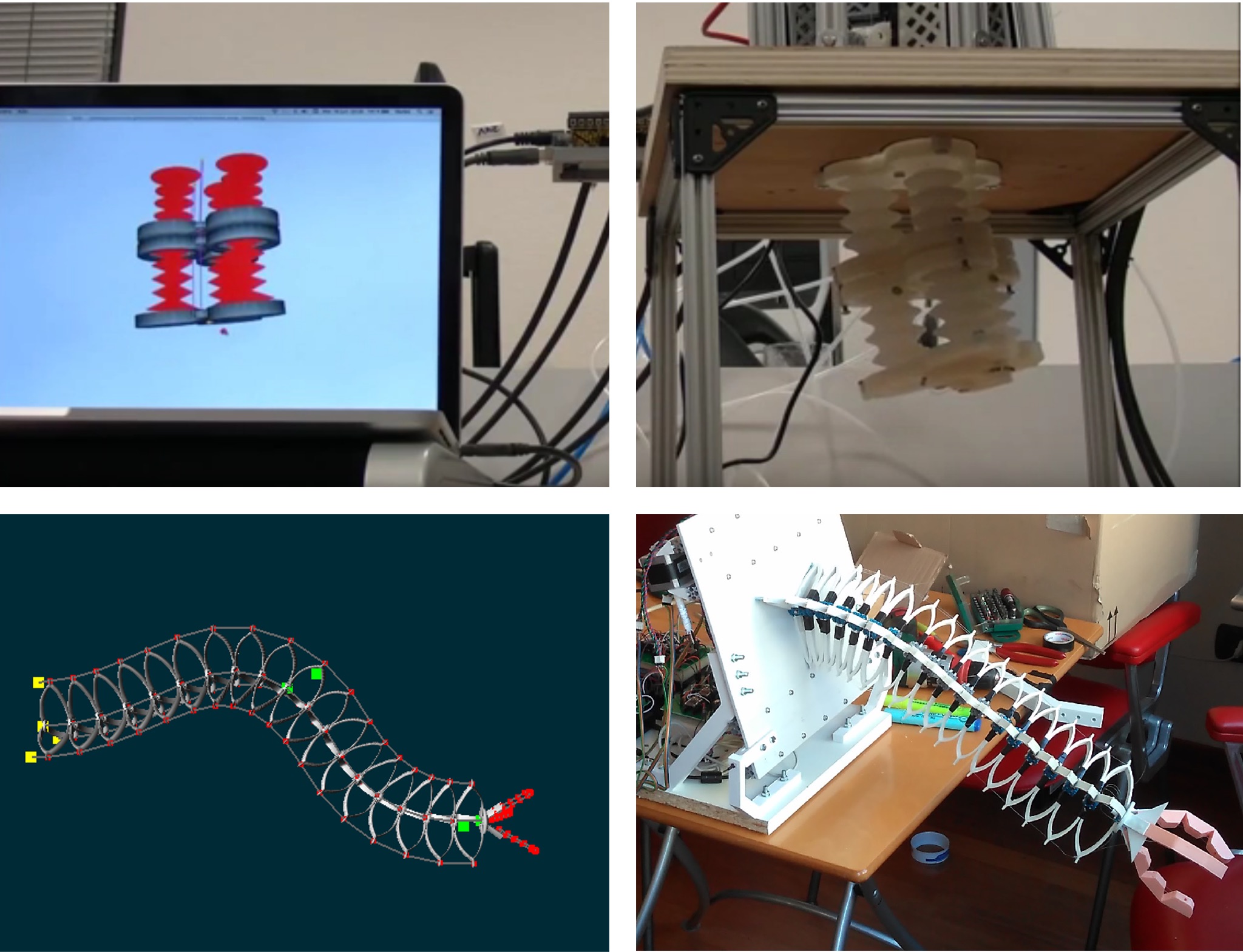
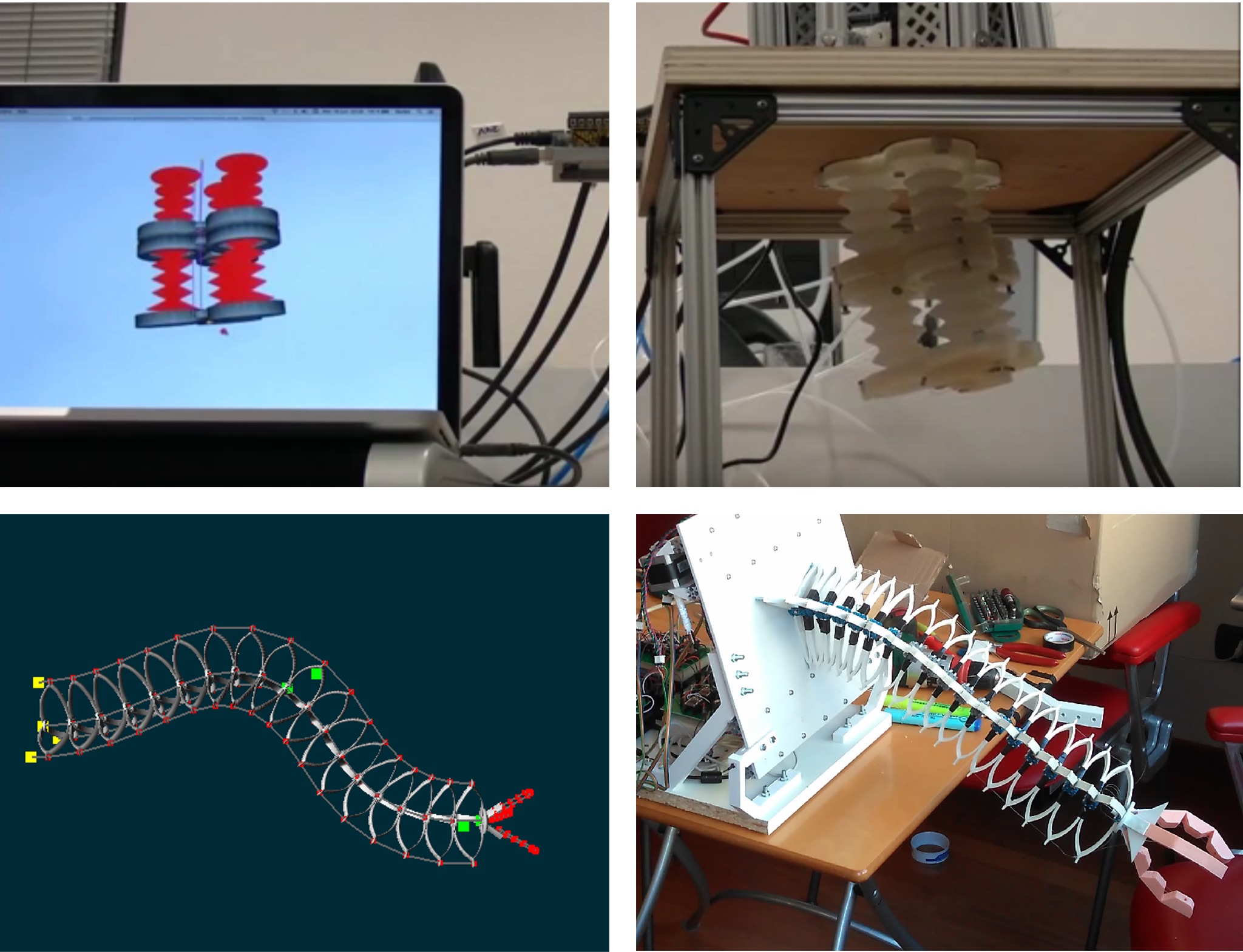
Soft robotics is an emerging field of robotics which requires computer-aided tools to simulate soft robots and provide models for their control. Until now, no unified software framework covering the different aspects exists. ...
Lire la suite >
Lire la suite >
Anglais
Oui
Internationale
Non
Fichiers

- Accès libre
- Accéder au document

- Accès libre
- Accéder au document
- Accès libre
- Accéder au document
- Accès libre
- Accéder au document
- Accès libre
- Accéder au document

- Accès libre
- Accéder au document
- Accès libre
- Accéder au document
- Accès libre
- Accéder au document
- Accès libre
- Accéder au document
- Accès libre
- Accéder au document
- Accès libre
- Accéder au document
- Accès libre
- Accéder au document
- Accès libre
- Accéder au document