
Monocular 3D Reconstruction and Augmentation ...

Article dans une revue scientifique: Article original
Monocular 3D Reconstruction and Augmentation of Elastic Surfaces with Self-occlusion Handling
Haouchine, Nazim [Auteur]
Dequidt, Jeremie [Auteur]
Berger, Marie-Odile [Auteur]
Cotin, Stephane [Auteur]
Dequidt, Jeremie [Auteur]
Berger, Marie-Odile [Auteur]
Cotin, Stephane [Auteur]
IEEE Transactions on Visualization and Computer Graphics
14
Institute of Electrical and Electronics Engineers
2015
1077-2626
Elastic Augmented Reality
Non-rigid Registration
Computer Assisted Surgery
Index Terms—Image-guided Simulation
Physics-based Modeling
Non-rigid Registration
Computer Assisted Surgery
Index Terms—Image-guided Simulation
Physics-based Modeling
Informatique [cs]
[en]
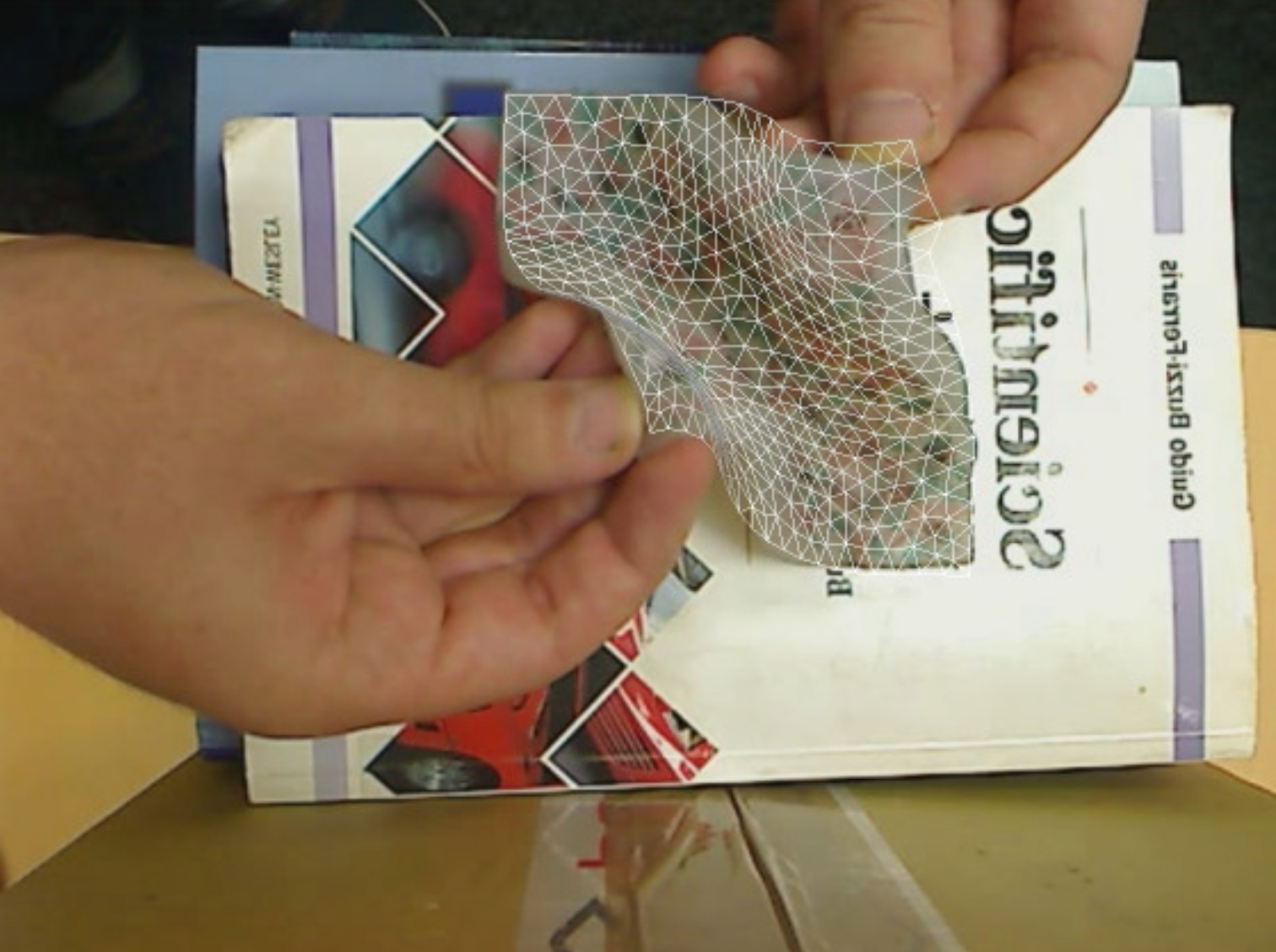
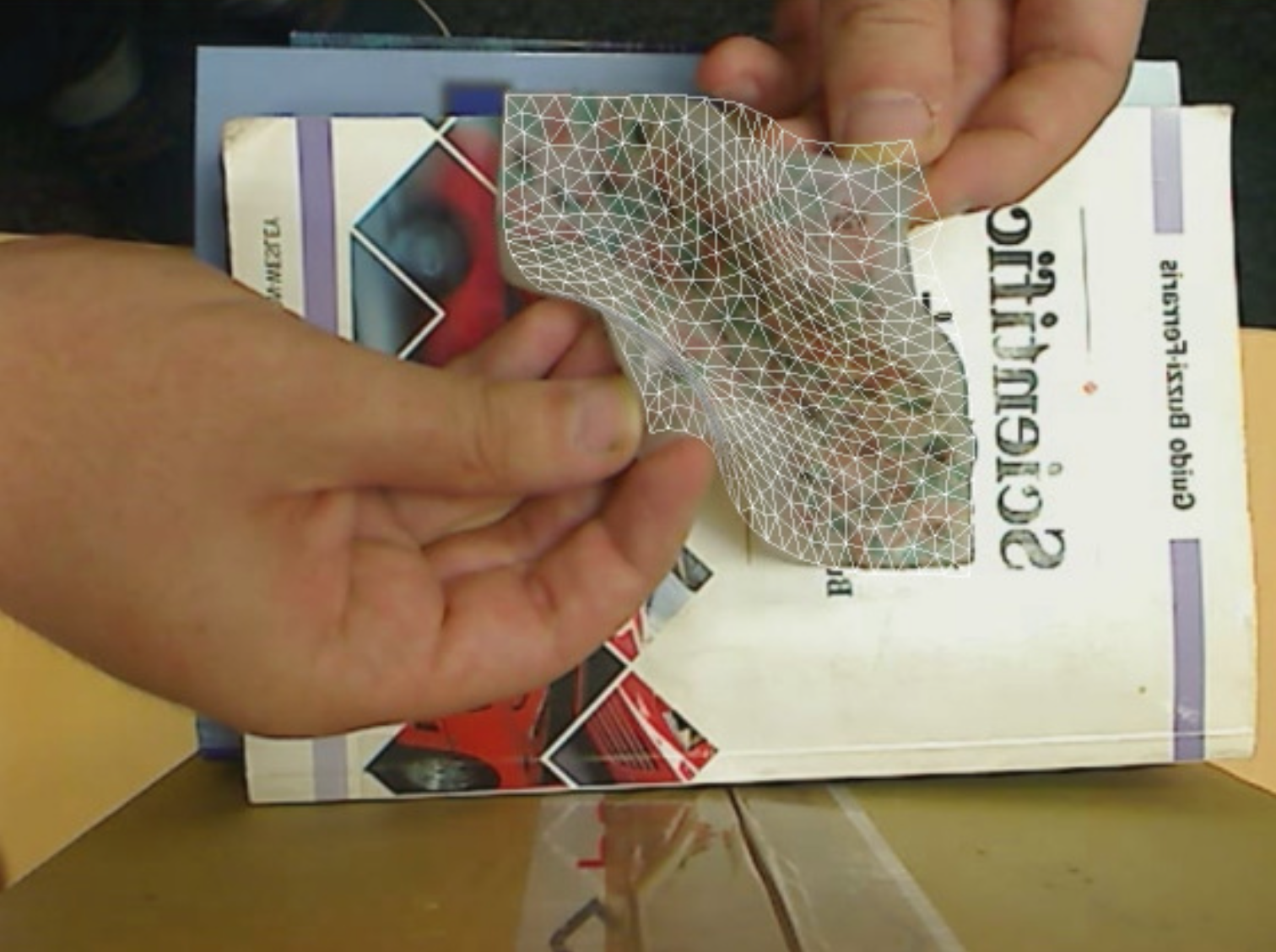
This paper focuses on the 3D shape recovery and augmented reality on elastic objects with self-occlusions handling, using only single view images. Shape recovery from a monocular video sequence is an underconstrained problem ...
Show more >
Show more >
Anglais
Oui
Internationale
Non
Files

- Open access
- Access the document

- Open access
- Access the document
- Open access
- Access the document
- Open access
- Access the document

- Open access
- Access the document
- Open access
- Access the document
- Open access
- Access the document
- Open access
- Access the document
- Open access
- Access the document
- Open access
- Access the document